अंतरिक्ष यात्री, अपने रोवर इंजन शुरू करें। दो अंतरिक्ष यात्रियों ने हाल ही में अंतरराष्ट्रीय अंतरिक्ष स्टेशन पर अपने पर्च से कैलिफोर्निया में एक रोवर वाहन को नियंत्रित किया - लगभग 250 मील (400 किलोमीटर) उपरि।
यह अवधारणा अपने आप में शांत है, लेकिन नासा के पास लॉफ्टर उद्देश्य हैं। यह उन चंद्रमा और क्षुद्रग्रह और मंगल मानव मिशनों के बारे में सोच रहा है कि एजेंसी वास्तव में एक दिन का संचालन करना चाहेगी, अगर यह धन और प्राधिकरण प्राप्त करता है।
संभावित रूप से, कहते हैं, आपके पास सीमित समय में यथासंभव सतह का पता लगाने के लिए रोवर्स का उपयोग करके एक मंगल दल हो सकता है।
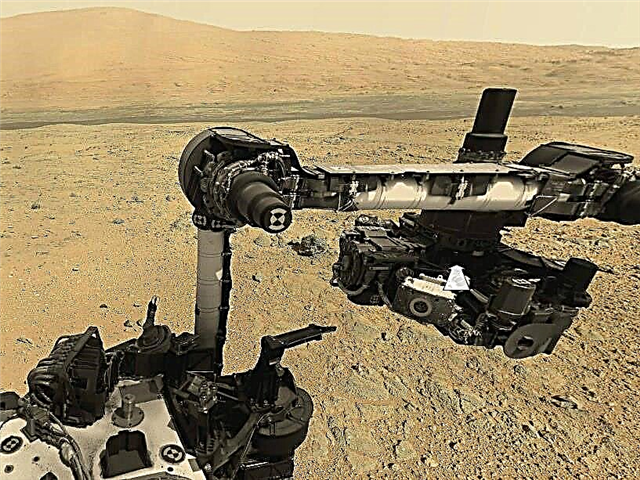
मार्स क्यूरियोसिटी और उसके पूर्ववर्ती रोवर्स ने मंगल ग्रह पर आश्चर्यजनक चीजें पाई हैं, लेकिन चुनौती मंगल और पृथ्वी के बीच संचार में औसतन 20 मिनट की देरी है। NASA ने इस समस्या के लिए चतुराई से खतरों से बचने वाले सॉफ्टवेयर जैसी तकनीकों के माध्यम से जानकारी दी है ताकि जिज्ञासा, कहना, एक बड़े मार्टियन बोल्डर में दुर्घटना नहीं होगी। (इस लिंक पर नासा से अधिक तकनीक।) लेकिन सतह के ऊपर अंतरिक्ष यात्री होने से समय में देरी होगी और संभवतः मंगल रोवर ड्राइविंग को हमेशा के लिए बदल देगा।

तो उस परीक्षण के बारे में: दो अंतरिक्ष यात्रियों ने अब तक K10 के ग्रह यान को "Roverscape" के आसपास NASA के एम्स रिसर्च सेंटर कैलिफोर्निया में चलाया है। नासा कहता है कि ये "अंतरिक्ष में अंतरिक्ष यात्री द्वारा अंतरिक्ष यान के पहले पूर्ण-संवादात्मक रिमोट ऑपरेशन को चलाता है।"
अभियान 36 के क्रिस कैसिडी 15 जून को पहली बार उठे, तीन घंटे मशीन को रॉक-स्ट्रेवन क्षेत्र में घूमते हुए बिताए, जो दो फुटबॉल मैदानों के आकार के बारे में है। तब उनके दल के साथी लुका पर्मिटानो ने 26 जुलाई को एक ऐसा मोड़ लिया, जिसमें एक नकली रेडियो एंटीना तैनात किया गया। अगस्त में एक और परीक्षा सत्र होना चाहिए।
टेम्स फोंग, मानव अन्वेषण टेलीरोबोटिक्स परियोजना प्रबंधक एम्स ने कहा, "जहां जॉयस्टिक का उपयोग करने के लिए अंडरस्टेक एक्सप्लोरेशन में जॉयस्टिक का उपयोग करना और दूरस्थ पनडुब्बियों पर सीधा नियंत्रण रखना आम बात है, के 10 रोबोट अधिक बुद्धिमान हैं।"
फोंग ने कहा, "अंतरिक्ष यात्री रोबोट के साथ उच्च स्तर पर बातचीत करते हैं, जहां उन्हें जाना है और फिर रोबोट स्वतंत्र रूप से और बुद्धिमानी से यह पता लगाता है कि कैसे सुरक्षित रूप से वहां पहुंचा जा सकता है," फोंग जोड़ा, जो एम्स के बुद्धिमान रोबोटिक्स समूह के निदेशक भी हैं।
परीक्षणों ने एक मिशन को चंद्रमा के L2 लैग्रैन्जियन बिंदु के लिए प्रेरित किया, एक ऐसा स्थान जहां चंद्रमा और पृथ्वी का संयुक्त गुरुत्वाकर्षण अंतरिक्ष यान को सतह से लगभग स्थिर रहने की अनुमति देता है। इस तरह के मिशन के लिए एक संभावना पृथ्वी के विपरीत, पृथ्वी के रेडियो शोर से दूर चंद्र पक्ष पर एक रेडियो दूरबीन तैनात करने की होगी।
ये परीक्षण तकनीकी फर्स्ट के एक जोड़े को भी प्रदर्शित करते हैं:
- नासा रोबोट को अंतरिक्ष से रोबोट को नियंत्रित करने के लिए एक रोबोट एप्लीकेशन प्रोग्रामिंग इंटरफेस डेलीगेट (आरएपीआईडी) रोबोट डेटा मैसेजिंग सिस्टम का परीक्षण कर रहा है, अनिवार्य रूप से संचार को आसान बनाने के लिए नंगे आवश्यक जानकारी को पट्टी करने के लिए काम कर रहा है। (आरएपीआईडी का परीक्षण पहले भी किया जा चुका है, लेकिन इस तरह से कभी नहीं।)
- एजेंसी पहली बार टेलोबोबोटिक्स के लिए अंतरिक्ष में अपने एनसेंबल सॉफ्टवेयर का भी उपयोग कर रही है। इसका वर्णन "मिशन संचालन सॉफ्टवेयर के विकास, एकीकरण और तैनाती के लिए खुली वास्तुकला" है।
स्रोत: नासा