दो छोटे, hopping रोबोट अब बड़े क्षुद्रग्रह Ryugu की सतह पर एक साथी है।
Shoebox- आकार के लैंडर को मोबाइल एस्टेरॉइड सरफेस स्काउट (MASCOT) कहा जाता है, जो अपनी मांशिप, जापान के हायाबुसा 2 अंतरिक्ष यान से तैनात है, जैसा कि 9:57 बजे योजना बनाई गई थी। EDT मंगलवार (2 अक्टूबर; 0157 GMT 3 अक्टूबर को) और उसके बाद जल्द ही Ryugu में आराम करने के लिए आया था। क्षुद्रग्रह Ryugu के लैंडर की पहली तस्वीर एक चट्टानी दुनिया और यहां तक कि MASCOT की अपनी छाया दिखाती है।
जर्मनी के ब्रेमेन के डीएलआर इंस्टीट्यूट ऑफ स्पेस सिस्टम्स के मास्टरकॉट प्रोजेक्ट एमआई ट्राई-हो ने कहा, "यह बेहतर नहीं हो सकता था।" (डीएलआर जर्मन एयरोस्पेस सेंटर के लिए जर्मन का संक्षिप्त नाम है, जिसने फ्रांसीसी अंतरिक्ष एजेंसी, सीएनईएस के सहयोग से MASCOT का निर्माण किया है।) [जापान के हायाबुसा 2 क्षुद्रग्रह रयुगो मिशन इन पिक्चर्स]

"लैंडर के टेलीमेट्री से, हम यह देखने में सक्षम थे कि यह मातृभूमि से अलग हो गया और लगभग 20 मिनट बाद क्षुद्रग्रह की सतह के साथ संपर्क बना," हो ने कहा।
MASCOT ने पहले ही अपने चार जहाज विज्ञान उपकरणों - एक कैमरा, एक रेडियोमीटर, एक स्पेक्ट्रोमीटर और एक मैग्नेटोमीटर - मिशन टीम के सदस्यों के साथ डेटा इकट्ठा करना शुरू कर दिया है। 22-एलबी। (10 किलोग्राम) लैंडर को जल्दबाजी करनी चाहिए, क्योंकि इसकी बैटरी टचडाउन के ठीक 16 घंटे बाद मरने की उम्मीद है।
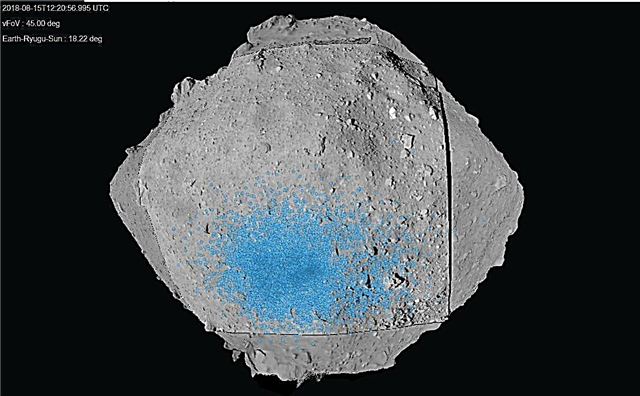
MASCOT ने Ryugu की ओर धीमी गति से उतरने के दौरान 20 तस्वीरें लीं और ये चित्र फिलहाल Hayabusa2 पर संग्रहीत हैं, मिशन टीम के सदस्यों ने कहा। और जुदाई से पहले मैग्नेटोमीटर द्वारा किए गए अवलोकन (जो तब होता है जब हायाबुसा 2 लगभग 167 फीट, या 51 मीटर, Ryugu से ऊपर था) ने पहले ही इसे पृथ्वी के नीचे कर दिया है।
MASCOT टीम के सदस्य कार्ल-हेनज़ ग्लेमियर ने जर्मनी के तकनीकी विश्वविद्यालय, ब्रंसचिवग से एक ही बयान में कहा, "माप सौर वायु के अपेक्षाकृत कमजोर क्षेत्र और अंतरिक्ष यान के कारण होने वाली बहुत ही मजबूत चुंबकीय गड़बड़ी को दर्शाता है।" "अलगाव के क्षण में, हमें हस्तक्षेप क्षेत्र की स्पष्ट कमी की उम्मीद थी - और हम इसे स्पष्ट रूप से पहचानने में सक्षम थे।"

MASCOT MINERVA-II1A और MINERVA-II1B, दो 2.4-lb के नक्शेकदम पर चल रहा है। (1.1 किग्रा) रोवर्स ने 21 सितंबर की रात हायाबुसा 2 से तैनात किया। उन दोनों छोटे रोबोटों ने अपने टचडाउन को बंद कर दिया और जल्द ही रयगु की सतह की खोज शुरू कर दी।
जापानी निर्मित मिनर्वा- II1A और MINERVA-II1B की तरह, स्वायत्त MASCOT hopping द्वारा स्थानांतरित कर सकता है, जो यह अपने शरीर के अंदर एक धातु "स्विंग आर्म" में हेरफेर करके करता है। एक महत्वपूर्ण विशेषता - लैंडर इस हाथ का उपयोग रयगु की सतह पर खुद को सही करने के लिए भी कर सकता है, क्योंकि डेटा को इकट्ठा करने के लिए MASCOT को राइट साइड होना चाहिए और इसे Hayabusa2 तक बीम करना होगा।

$ 150 मिलियन के हायाबुसा 2 मिशन ने दिसंबर 2014 में लॉन्च किया और इस साल के अंत में जून के अंत में रायुगु के आसपास की कक्षा में पहुंचे। मातृत्व में जाने के लिए एक और रोवर की तैनाती हो सकती है: यह अभी भी "वैकल्पिक" हॉपर मिनर्वा -2 II को वहन करता है, जो अगले साल Ryugu की सतह पर अपना रास्ता बना सकता है।
और ऑर्बिटर खुद को 2019 में स्पेस रॉक के लिए नीचे ले जाएगा, साथ ही रयगू में एक noxplosive इंप्लॉयर बार्रेलिंग को भेजने के बाद। हायाबुसा 2 नए सिरे से बनाए गए गड्ढे से पहले के उपसतह नमूने लेगा। यह सामग्री दिसंबर 2020 में एक वापसी कैप्सूल में पृथ्वी पर आने के लिए निर्धारित है।
Ryugu में मिशन द्वारा एकत्र किए गए डेटा और वैज्ञानिकों द्वारा इसके लौटे नमूने की जांच करने पर सौर प्रणाली के प्रारंभिक इतिहास पर काफी प्रकाश डाला जाना चाहिए और यह कि कार्बन-समृद्ध क्षुद्रग्रह जैसे कि Ryugu पृथ्वी पर जीवन के उद्भव में हो सकता है, हायाबुसा 2 के सदस्यों ने कहा है।

मोटे तौर पर इसी तरह के लक्ष्यों के साथ नासा का अपना स्वयं का एक क्षुद्रग्रह-नमूना मिशन है। OSIRIS-REx जांच 31 दिसंबर को 1,650 फुट चौड़ी (500 मीटर) क्षुद्रग्रह बेन्नू के आसपास की कक्षा में पहुंचने और सितंबर 2023 में पृथ्वी पर नमूने वापस करने के लिए निर्धारित है।
इस कहानी को 2:45 बजे EDT ने 3 अक्टूबर को अपडेट किया। इस खबर के साथ कि MASCOT सुरक्षित रूप से उतरा और डेटा इकट्ठा करना शुरू कर दिया है।