मिशन रोबोट वास्तव में नफरत करते हैं जब अंतरिक्ष रोबोट पाठ्यक्रम से बाहर निकलते हैं। हम निश्चित रूप से इन दिनों सफलता की संभावनाओं को बेहतर कर रहे हैं (मार्स क्यूरियोसिटी के सात मिनट के आतंक को याद रखें?), लेकिन एक अंतरिक्ष एजेंसी के पास अपनी आस्तीन पर एक फैंसी सिम्युलेटर है जो लैंडिंग को और भी सटीक बना सकता है।
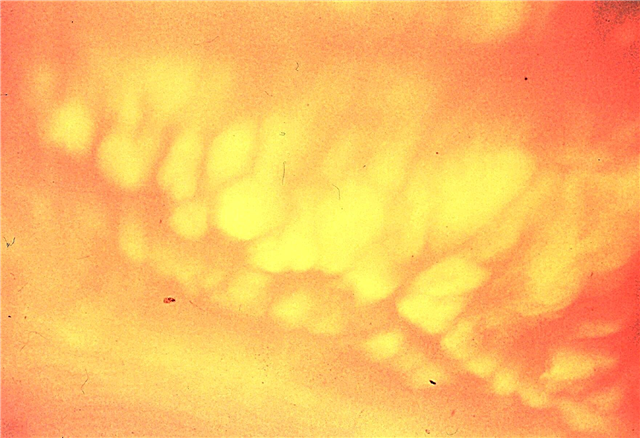
ऊपर दिखाया गया है, इस सॉफ्टवेयर और हार्डवेयर (यूरोपीय अंतरिक्ष एजेंसी में परीक्षण किया गया) ने फ्रेंच एयरोस्पेस सेंटर ONERA को प्रभावित किया कि अधिकारियों ने हाल ही में मुख्य शोधकर्ता को काम के लिए एक पुरस्कार दिया।
"यदि मैं पेरिस में एक पर्यटक हूं, तो मैं मानचित्र पर अपनी स्थिति खोजने में मदद करने के लिए एफिल टॉवर, आर्क डे ट्रायम्फ या नोट्रे डेम कैथेड्रल जैसे प्रसिद्ध स्थलों के लिए दिशा-निर्देश देख सकता हूं", जेफ डेलॉने, पीएचडी ने कहा। । शोध करते छात्र।
"अगर एक ही प्रक्रिया को अंतरिक्ष से एक कैमरा, अंतरिक्ष यान की आंख से देखे जाने वाले पर्याप्त स्थानों के साथ दोहराया जाता है, तो यह तब बहुत सटीक पहचान कर सकता है जहां यह दृश्य जानकारी की तुलना उन मानचित्रों से करता है जो हमारे पास कंप्यूटर में जहाज पर हैं।"

क्योंकि लैंड-अप क्लोज़-अप वास्तव में बहुत दूर से अलग दिख सकता है, इस प्रणाली में उस समस्या के आसपास प्रयास करने और प्राप्त करने की एक विधि है।
तथाकथित ing लैंडिंग विथ इनर्टिअल एंड ऑप्टिकल नेविगेशन ’(LION) प्रणाली अंतरिक्ष यान के कैमरे द्वारा उत्पन्न वास्तविक समय की छवियों को लेती है और इसकी तुलना पिछले मिशनों के मानचित्रों से करती है, साथ ही सतह के 3-डी डिजिटल मॉडल से भी।
सिंह हर बिंदु के सापेक्ष आकार को देख सकता है, चाहे वह एक बड़ा गड्ढा हो या एक छोटा बोल्डर।
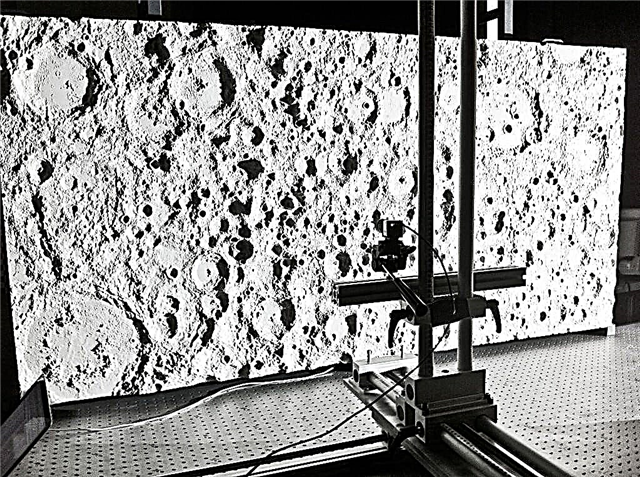
नूर्डविज्क, नीदरलैंड में ईएसए के नियंत्रण हार्डवेयर प्रयोगशाला में, अधिकारियों ने चंद्रमा के उच्च-रिज़ॉल्यूशन वाले सिस्टम का परीक्षण किया।
हालांकि यह सिर्फ एक परीक्षण है और इस प्रणाली के अंतरिक्ष-तैयार होने से पहले अभी भी एक रास्ता है, ईएसए ने कहा कि सिम्युलेटेड पोजिशनल सटीकता 164 फीट से 1.86 मील (या 50 मीटर की ऊंचाई पर तीन किलोमीटर की दूरी पर) में 164 फीट से बेहतर थी।
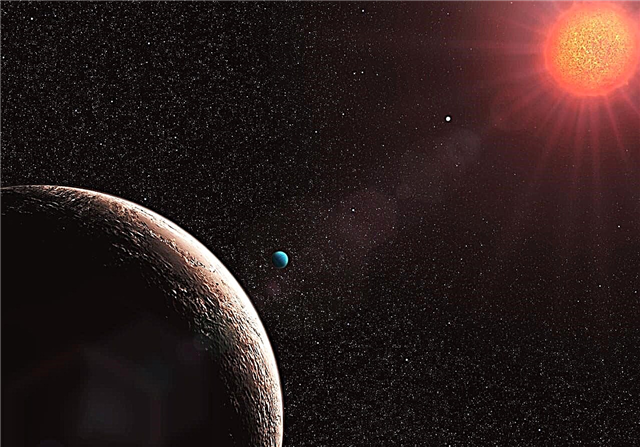
ओह, और जब तक यह अभी तक नकली चंद्रमा इलाके के साथ परीक्षण किया गया है, यह संभव है कि एक ही प्रणाली एक क्षुद्रग्रह पर एक रोबोट भूमि, या मंगल, ईएसए मदद कर सकती है।
इस बात पर कोई शब्द नहीं है कि सिस्टम पहले एक इंटरप्लेनेटरी राइड को कैसे बाधित करेगा, लेकिन डेल्यूने मानव रहित हवाई वाहनों जैसे स्थलीय मामलों पर अनुसंधान को लागू करने के लिए काम कर रहा है।
ईएसए की वेबसाइट पर परीक्षण के बारे में अधिक जानकारी देखें।
स्रोत: ईएसए