हालांकि हम में से कुछ अभी के बारे में रेत में अपने पैर की उंगलियों को चिपकाने का सपना देख रहे हैं, क्यूरियोसिटी रोवर वास्तव में ऐसा कर रहा है। लेकिन यह रोवर के लिए कोई अवकाश नहीं है, क्योंकि वह मंगल पर कुछ बहुत ही असामान्य और हड़ताली रेत के टीलों के माध्यम से अपना रास्ता बनाती है। बैगनॉल्ड ड्यून फील्ड माउंट के उत्तर-पश्चिमी फ्लैंक के साथ स्थित है। तीव्र - अपने मिशन के लिए जिज्ञासा का मुख्य लक्ष्य - और यह पहली बार है जब हमें पृथ्वी के अलावा कहीं भी सक्रिय रेत के टीलों का क्लोज़-अप अध्ययन करने का अवसर मिला है।
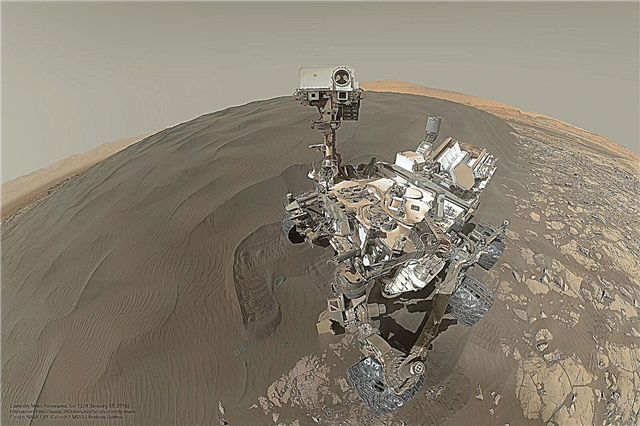
इस 57-छवि मोज़ेक, सेल्फी ’के अपने संकलन को साझा करने के लिए एंड्रयू बोडरोव के लिए धन्यवाद, और आप टिब्बा के कुछ महान विचारों को देखने के लिए नीचे एक इंटरैक्टिव संस्करण के साथ खेल सकते हैं। छवियों को रोवर के मार्स हैंड लेंस इमेजर (MAHLI) द्वारा सोल 1228 (19 जनवरी, 2016) पर लिया गया था।
मार्स पैनोरमा - क्यूरियोसिटी रोवर: मार्टियन सोलर डे 1228
सैम के साथ टिब्बा नमूना
जबकि रोवर ने 57-छवि वाले इस मोज़ेक, सेल्फी ’को बनाने के लिए इन छवियों को लेना बंद कर दिया है, ios जिज्ञासा भी काफी व्यस्त रही है, दोनों टीलों के माध्यम से नेविगेट करने और कुछ नमूने लेने के लिए रुक गए। रोमांचक रूप से, रोवर ने रेत में से कुछ को स्कूप किया और इसे ऑन-बोर्ड केमिस्ट्री लैब, सैंपल एनालिसिस एट मार्स (एसएएम) में भेज दिया। यह केवल दूसरी बार है जब स्कूप का उपयोग छोटे भागों को वितरित करने के लिए किया गया है - आमतौर पर एक बच्चे के एस्पिरिन के आधे हिस्से के आकार का विश्लेषण किया जाता है; नमूनों को प्राप्त करने के लिए रोवर की ड्रिल का कई बार उपयोग किया गया है।
जिज्ञासा ने 14 जनवरी को अपने पहले टिब्बा नमूने को स्कैन किया, लेकिन रोवर अपने पहिए में अटका हुआ था, इसे एक पहिया के साथ बिखेर दिया। "स्कफ ने हमें विश्वास दिलाया कि हमारे पास पर्याप्त रेत है जहां हम स्कूपिंग कर रहे हैं कि स्कूप का रास्ता रेत के नीचे जमीन से नहीं टकराएगा," माइकल मैकहेनरी ने कहा, जो इन नमूनों को इकट्ठा करने के लिए रोवर प्लानर है।
मेरे पास जॉन माइकल मोरूकियन के साथ घूमने का मौका था, जेपीएल में क्यूरियोसिटी के लिए रोवर प्लानिंग टीम का नेतृत्व लगभग दो सप्ताह पहले किया गया था, और उन्होंने कहा कि योजना थोड़ी दूरी पर ड्राइव करने, स्कूप के साथ नमूने प्राप्त करने और उन्हें वितरित करने के लिए थी। बोर्ड पर प्रयोग।
मोरूकियन ने समझाया कि मार्स रिकॉइनेंस ऑर्बिटर पर HiRISE कैमरा से कक्षीय छवियों से, टीम को पता है कि रोवर को नेविगेट करने के लिए टिब्बा के बीच एक अच्छा रास्ता है, और रोवर के फंसने या फंसने का कोई खतरा नहीं होना चाहिए।
"हम उन्हें परिचालित कर रहे हैं, वहाँ बहुत सारे रास्ते उपलब्ध हैं," उन्होंने कहा। “यह अगम्य क्षेत्र नहीं है। रोवर इस विशेष साइट पर होगा जो लगभग जनवरी के महीने के लिए सैंपलिंग कर रहा है, और वर्तमान योजना यह है कि कम सक्रिय टिब्बा को प्राप्त करने के लिए टिब्बा के बारे में एक किलोमीटर लंबा रास्ता तय करना है जो टिब्बा के एक ही क्षेत्र का हिस्सा हैं। "
स्कूप से एसएएम तक नमूने प्राप्त करने में 150 माइक्रोन (0.006 इंच) से बड़े कणों की जांच करने वाली छलनी के माध्यम से सामग्री को पास करने वाले रोवर की भुजा पर एक बहु-कक्षीय उपकरण के जटिल चाल का एक सेट शामिल होता है; कुछ सामग्री जो छलनी से गुजरती हैं, उन्हें उपकरण पर "पार्टर" से प्रयोगशाला इनलेट पोर्ट में गिरा दिया गया था।
"हम कंपन शुरू करते हैं और धीरे-धीरे स्कूप को झुकाते हैं," मोरूकियन ने समझाया। "सामग्री स्कूप के अंत से बहती है, एक बार में एक स्ट्रीम से अधिक में।"
छलनी द्वारा अवरुद्ध सामग्री को जमीन पर फेंक दिया जाता है।
क्यूरियोसिटी टीम के रयान एंडरसन के अनुसार, रोवर मास्टकैम और MAHLI कैमरे दोनों स्कूपिंग प्रक्रिया को अच्छी तरह से प्रलेखित कर रहे हैं, और मास्टकैम भी स्कूपिंग से छोड़े गए डंप बवासीर का अवलोकन कर रहे हैं, और कैमकैम पाइल्स का निष्क्रिय स्पेक्ट्रा लेगा । मास्टकैम भी एक टिब्बा नाम "हेब्रोन" को कई बार इमेजिंग करेगा, जबकि रोवर पास में होने पर किसी भी बदलाव को देखने के लिए।
मार्टियन क्रॉनिकल्स ब्लॉग पर क्यूरियोसिटी की हालिया गतिविधियों और जेपीएल के इस लेख के बारे में अधिक जानकारी प्राप्त करें।
और अगर आप सोच रहे हैं कि रोवर का हाथ स्व-छवि मोज़ाइक पर क्यों नहीं दिखता है, तो हमारे पिछले लेख को पढ़ें जो इसे यहां बताता है।